Parameter Parsing for SSI Encoders with the Solidot Remote I/O Module XB6S-PS20D
An SSI absolute encoder is a rotary/linear sensor that outputs a unique position code via a Synchronous Serial Interface. Its core characteristics are:
Absolute Position Output: Obtains precise position instantly upon power-up, requiring no homing to a reference point.
Anti-Interference Transmission: Utilizes differential signals (RS422 standard) for stable communication in noisy industrial environments.
No Cumulative Error: Directly reads physical position encoding, eliminating pulse count deviation.

The XB6S-PS20D is a Solidot Slice-type SSI absolute encoder counting module, designed for input, counting, and probe latching functions specific to SSI encoders. It supports setting data bit length and position (frame length, LSB, MSB), supports two encoding displays (Gray code and Binary code), and offers a maximum sampling frequency of 2MHz.
I. Understanding the Definitions
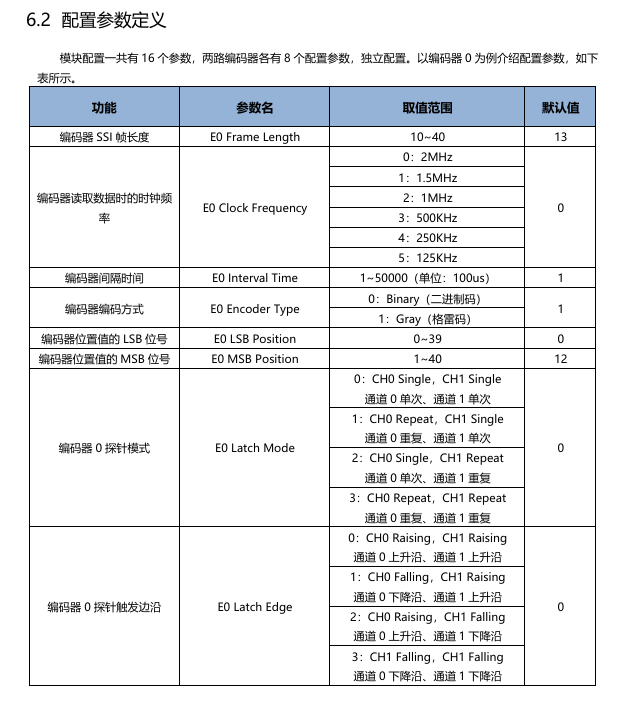
Frame Length: Refers to the total number of bits contained in a single data transmission. Its structure is: Frame Length = Position Data Bits + Status Bits + Check Bits.
LSB (Least Significant Bit): Refers to the bit with the smallest weight (lowest order bit) in the data frame.
MSB (Most Significant Bit): Refers to the bit with the greatest weight (highest order bit) in the data frame.
Example: TX [Data Transmission Direction] --> MSB --> B2[Bit n] --> ... --> LSB[Bit 0]
II. Detailed Explanation
Taking a multi-turn encoder as an example: if its frame structure is Turns (12 bits) + Angle (14 bits) + Status (4 bits) + CRC (2 bits) = 32-bit frame length, then the XB6S-PS20D must send N+1 clock pulses (where N = data bit length).
The first N pulses read the data bits.
The (N+1)th pulse reads the check bit.
This reflects the actual SSI frame transmission process (32 data bits + 1 check bit).
XB6S-PS20D sends clocks: Pulse 1 --> Pulse 2 ... --> Pulse 33.
Encoder outputs: Data Bit 32 --> Data Bit 31 ... --> Check Bit.
Here, the valid data (Turns + Angle) is n=26 bits, where the MSB is n-1=25, and the LSB starts from 0.
Incorrect parameter settings will lead to issues:
If the Frame Length is set too short, the count data from the encoder will be erroneous, with high-order data loss causing the data waveform to appear triangular. If set too long, invalid bits are read, polluting the LSB with noise and causing some low-order data to fluctuate.
If the LSB is set incorrectly, data errors accumulate, resulting in a falsely high feedback value.
If the MSB is set incorrectly, it causes a massive positional deviation or offset.
Different encoders may vary in how they calculate data between the LSB and MSB, primarily using Binary or Gray code. All configuration parameters of the XB6S-PS20D must be consistent with the relevant encoder's manual for correct readings.
The above explains the parameter parsing for SSI encoders using the Solidot XB6S-PS20D Remote I/O module.