How to control CANopen slaves via protocol conversion gateway GW4U-COM-PNS with Siemens PLC?
Article Overview
1. Applicable Product
2. Protocol Conversion
PROFINET slave (Siemens PLC side) ↔ CANopen master (slave device side)
3. Compatible Master
Siemens S7-1200/1500 series PLC (TIA Portal)
4. Configuration Tools
TIA Portal (PROFINET side) + sDot GW CANopen Manager (CANopen side)
5. Core Value
After configuration, operators only need to read/write standard I/O addresses without understanding the details of the CANopen protocol
How to achieve interconnection and data exchange between Siemens S7-1200/1500 PLC and CANopen slave devices?
This can be achieved through the Solidot protocol conversion gateway GW4U-COM-PNS . Simply read/write I/O addresses in TIA Portal to control and collect data from CANopen devices. This article introduces the steps for adding the gateway in TIA Portal, configuring CANopen parameters, and I/O read/write verification.
I. System Topology

Siemens PLC (PROFINET master) ↔ GW4U-COM-PNS (PROFINET slave to CANopen master) ↔ CANopen slave I/O devices (or CANopen servo drives, frequency converters, etc.)
II. Configuration Steps
1. Add the Gateway in TIA Portal
Solidot provides the GSD file for the GW4U-COM-PNS gateway. Import the GSD file into TIA Portal, find the gateway device in the hardware catalog, drag it to the network view, and connect it to the PLC's PROFINET interface to complete the PROFINET side configuration.
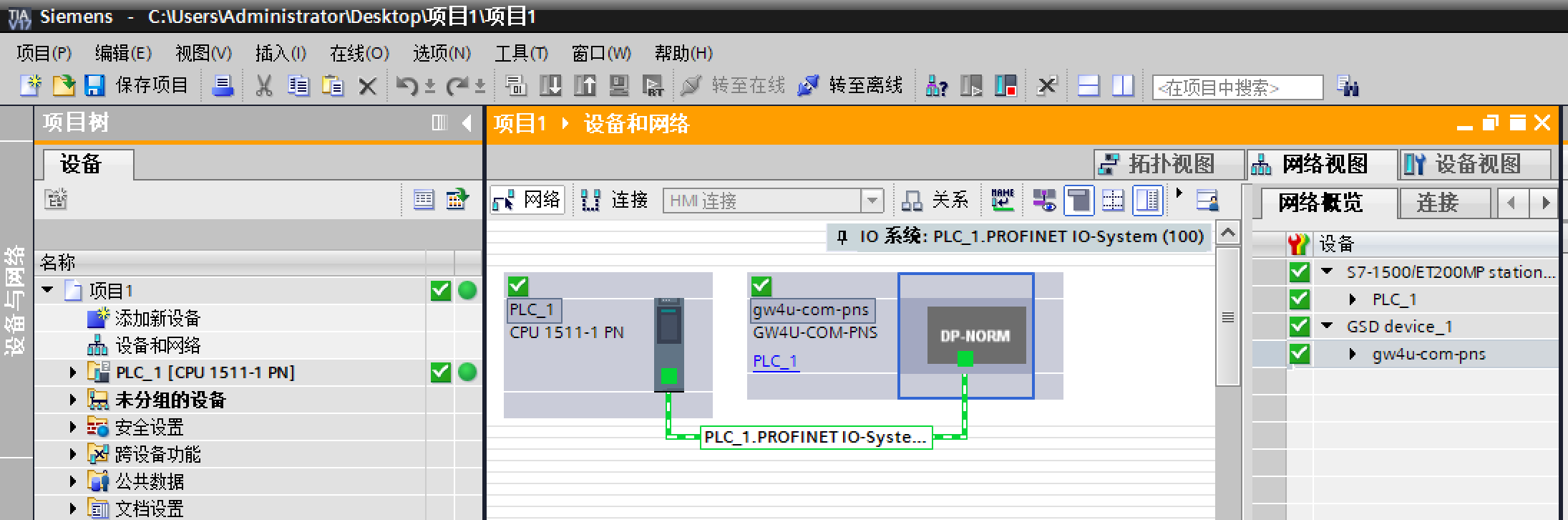
Note: The GSD file can be downloaded from the Solidot official website product page. The import method is the same as for standard GSD files: go to "Options → Manage general station description files (GSD)" in TIA Portal to complete the installation.
2. Configure the CANopen Side
Use the sDot GW CANopen Manager configuration software provided by Solidot to configure the CANopen bus side parameters:
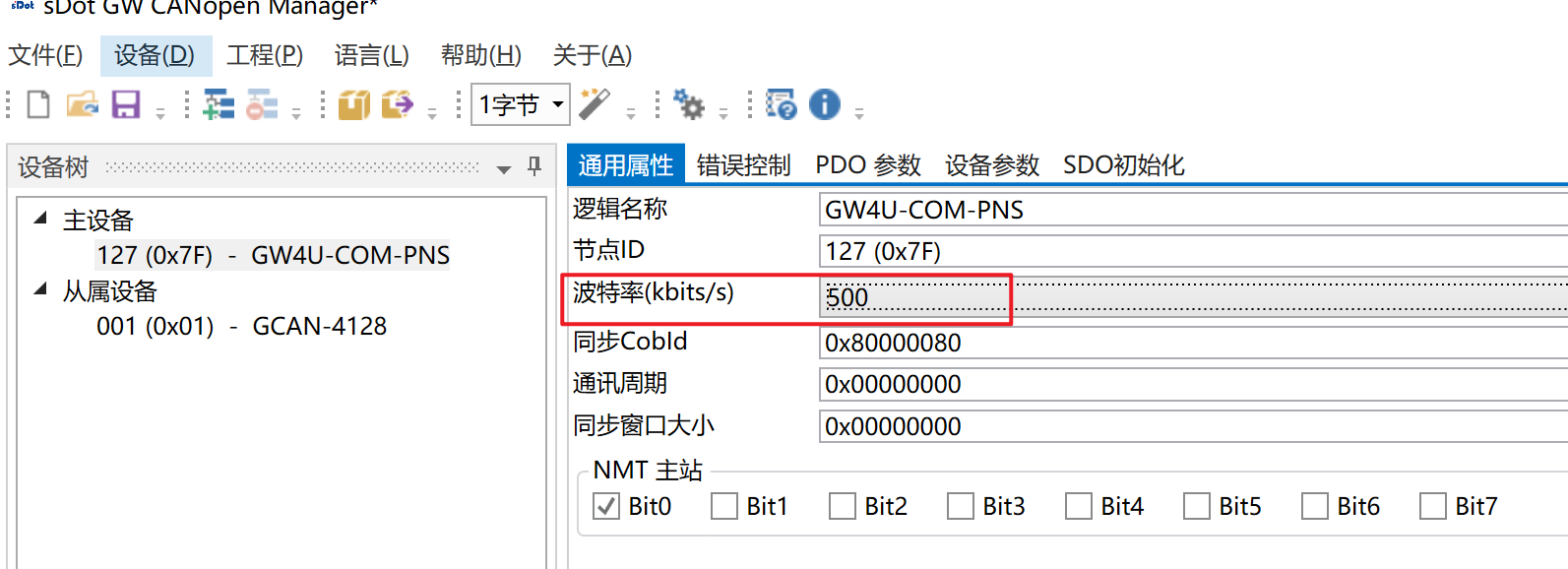
(1) Basic Parameter Settings
Set the CANopen bus baud rate and node ID, ensuring they match the configuration of the CANopen slave devices.
(2) PDO Mapping Configuration
PDO mapping is the key step for binding the control parameters of the CANopen slave to the gateway's input/output addresses. Operation: Import the EDS file provided by the CANopen slave manufacturer, and the configuration software will automatically parse the available parameter list. Complete the PDO mapping through point-and-click operations – intuitive and straightforward.
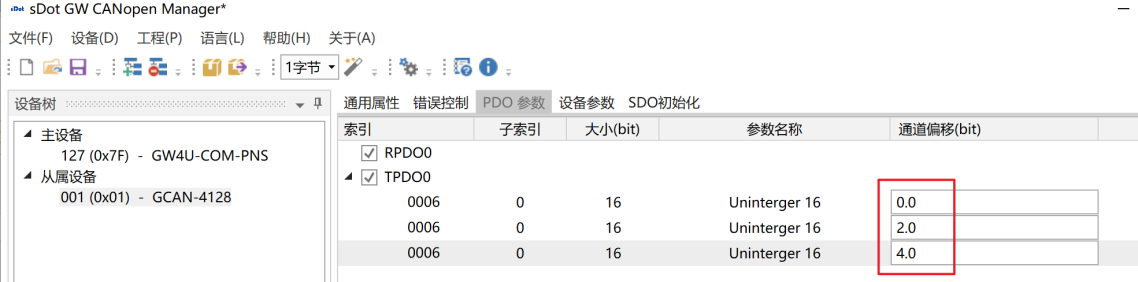
Note: The EDS file is provided by the CANopen slave device manufacturer. After import, the software automatically identifies the parameters supported by the device, requiring no manual input of the object dictionary.
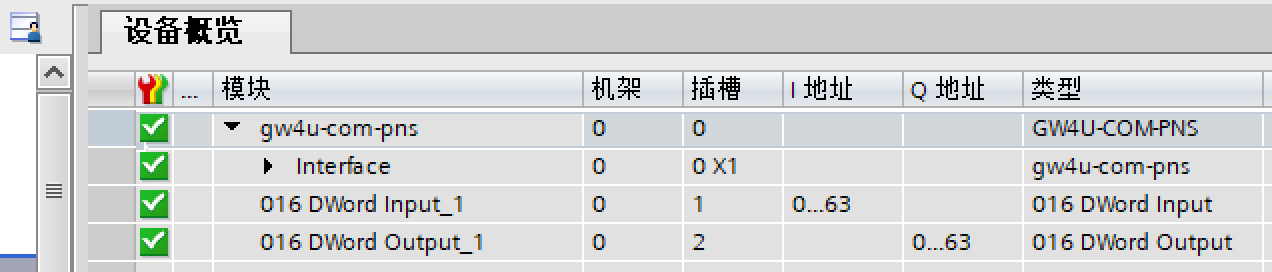
(3) TIA Portal Side I/O Address Mapping and Read/Write Verification
After completing the above configuration, data exchange with the CANopen slave is performed through the following address ranges on the TIA Portal side:

In this example, the slave is a 4DI/4DO I/O device, with 1 byte each for input and output – the first 4 bits are valid data, and the last 4 bits are reserved.
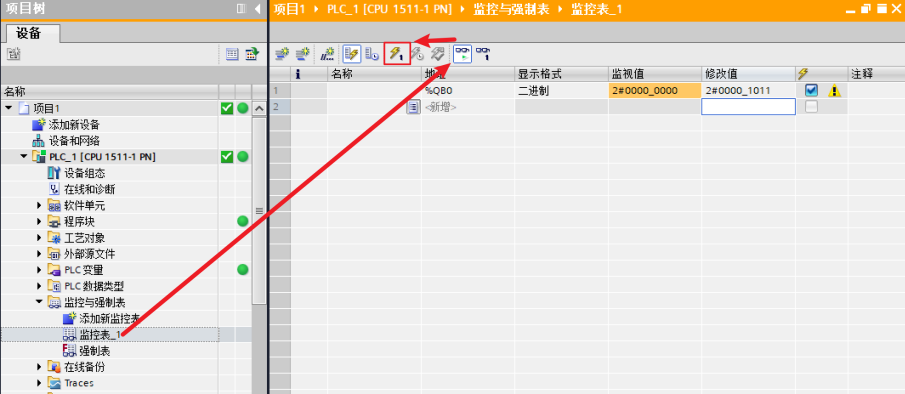
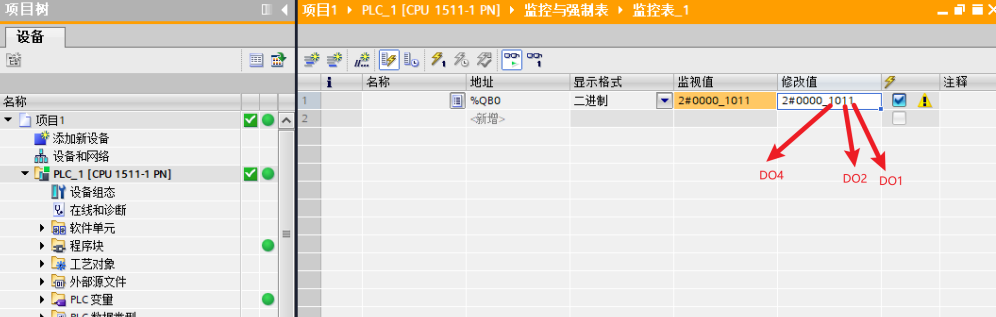
① Control CANopen slave output channels
In the TIA Portal monitoring table, assign a value to the output byte corresponding to QB0. In this example, control DO1, DO2, and DO4 output, while DO3 is not output. Write the corresponding bit values and execute "Modify all selected values immediately once". After confirming successful writing, observe that the indicator lights of DO1, DO2, and DO4 on the slave illuminate.

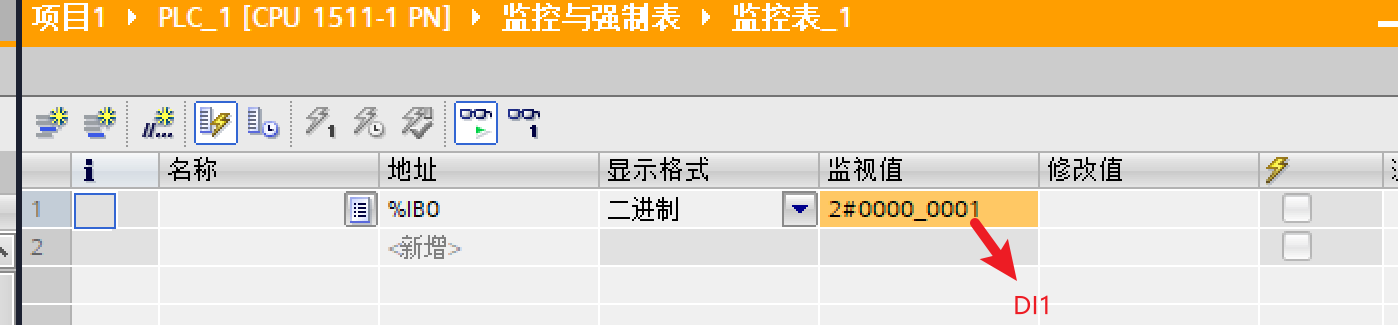
② Read CANopen slave input channels
In the TIA Portal monitoring table, monitor address IB0. After applying a valid input signal to DI1 of the slave, the corresponding bit in IB0 can read the input status change, verifying that the input acquisition function is normal.
III. Application Summary
After protocol conversion through the GW4U-COM-PNS gateway, the operation of Siemens PLCs to control CANopen devices becomes very intuitive. The summary is as follows:
Control frequency converter start: Write a start command to the corresponding Q address.
Adjust motor speed: Write the target speed value to the corresponding output word.
Read device status: Directly read status data from the corresponding I address.
Throughout the entire control process, the operator does not need to touch any details of the CANopen protocol. What they see is just standard I/O mapping read/write operations – completely consistent with operating ordinary distributed I/O devices.